SIMULASI
KESEIMBANGAN, KESTABILAN DAN PERILAKU GALAU
SISTEM DETERMINISTIK
(Equilibrium,
steady state and chaotic behavior
simulations of a deterministic system)
Oleh:
Rudy C Tarumingkeng, PhD
Guru
besar Ekologi Kuantitatif,
PPs-IPB
Model-model
sistem yang bersifat deterministik sering kali memerlukan pengujian
kestabilan,
terutama jika model yang bersangkutan akan digunakan untuk keperluan
peramalan.
Analisis kestabilan adalah kajian atas proses perkembangan suatu sistem
yaitu
seberapa jauh perkembangan sistem yang dimodelkan menyimpang dari titik
keseimbangan yang dicapainya. Pada
akhir uraian ini akan ditunjukkan bahwa dalam keadaan tertentu (status
awal dan
laju perubahan tertentu model deterministik menunjukkan perilaku galau (chaotic
behavior).
1.
KESEIMBANGAN DALAM PERTUMBUHAN POPULASI
Keadaan seimbang dikenal dengan beberapa istilah, sesuai dengan wawasan yang dikaji. Dalam kajian ekologi dan ekonomi istilah keseimbangan (equilibrium) sangat umum dipakai untuk menggambarkan keadaan dinamika sistem yang tidak mengalami gejolak. Apabila suatu sistem yang berada dalam keadaan seimbang salah satu subsistem atau komponen sistemnya mengalami gangguan (perturbasi) maka seluruh sistem akan berubah. Besarnya perubahan mungkin dalam kuantitas yang sangat kecil, tetapi setelah beberapa waktu perturbasi ini dapat memberikan akibat yang mungkin tidak terduga sebelumnya. Perturbasi yang kecil dapat juga menyebabkan peningkatan populasi untuk beberapa waktu jika terjadi peningkatan dalam amplitudo osilasi. Perubahan dalam keseimbangan pertumbuhan populasi yang berbentuk suatu gejolak yang besar dapat menyebabkan kerusakan terhadap ekosistem, kepunahan populasi atau ledakan yang membawa bencana. Keadaan seimbang yang stabil dalam literatur ekologi disebut stable equilibrium atau steady state. Dalam keadaan demikian perubahan-perubahan yang berlangsung dalam sistem dianggap sangat kecil dan tidak terlihat gejolak-gejolak yang berarti. Salah satu contoh adalah hutan alam yang dalam keadaan klimaks, atau hutan-hutan sekunder yang telah melalui beberapa suksesi dan mencapai keadaan seimbang yang stabil (Tarumingkeng, 1994).
Gambar
1. Kurva pertumbuhan populasi hayati hipotetik.
Untuk
memperoleh pengertian mengenai keseimbangan dan gejolak-gejolak
perjalanan
suatu sistem hayati kita perhatikan Gambar 1 yang mengilustrasikan
perkembangan
populasi yang bersifat hipotetik dari sejenis makhluk hidup.
Dengan
mudah dapat kita bedakan tiga keadaan yang dialami oleh populasi N
sepanjang waktu t,
yaitu:
1. keadaan pertumbuhan meningkat yang prosesnya
agak
stabil dari t0 -
ta.
2. keadaan bergejolak turun-naik (osilatori), ta
- tb.
3.
keadaan seimbang yang stabil dari tb dan
seterusnya.
Pada
pertumbuhan yang meningkat dengan mudah pula dapat kita mengatakan
bahwa model
pertumbuhannya mendekati eksponensial. Walaupun memang terdapat gejolak
turun
naik (osilasi) tetapi besarnya (magnitude) tidak
begitu berarti dan pada
umumnya pertumbuhan menggambarkan garis kecenderungan model
eksponensial yang
berlangsung stabil. Pada keadaan bergejolak kita perhatikan bahwa
kisaran
turun-naiknya (amplitudo) populasi sangat besar.
Proses demikian
menunjukkan suatu dinamika yang tidak stabil. Turun naiknya populasi
tak
terduga dan pada beberapa selang waktu, populasi menunjukkan
ledakan-ledakan (k1,
k2, k3) yang khas pada
epidemi hama dan patogen. Juga
terdapat beberapa titik kritis (l1, l2,
l3) di
mana pada waktu-waktu tersebut populasi seakan-akan menuju kepunahan.
Tetapi
gejolak-gejolak ini tidak berlangsung terus karena terjadi peredaman (damping)
sehingga populasi selanjutnya berkembang ke tahap ketiga, yaitu keadaan
seimbang yang mantap (stabil).
Pada
keadaan seimbang stabil perkembangan populasi menunjukkan osilasi
dengan
amplitudo yang kecil dan dalam garis besar mengikuti suatu garis lurus.
2.
KEADAAN SEIMBANG
Suatu
populasi yang berada dalam keadaan seimbang stabil jika mengalami
gangguan
(perturbasi) akan kembali ke keadaan seimbang. Keadaan seimbang stabil
digambarkan sebagai titik atraksi: titik atau status sistem yang
sedikit
menjauh dari keadaan seimbang yang stabil itu cenderung akan kembali ke
keadaan
semula. Pada keadaan seimbang yang tidak stabil (atau seimbang tidak
mantap),
sistem yang sedikit bergeser dari keadaan itu cenderung akan menjauhi
titik
seimbang tidak stabil. Titik keseimbangan stabil dalam beberapa
literatur
disebut titik atraksi, sedangkan titik keseimbangan tidak stabil
disebut titik
penolakan atau titik repulsi (Edelstein-Keshet, 1988). Kedua titik ini
diilustrasikan dalam Gambar 2, sebagai bola A yang dalam keadaan
seimbang
stabil dan bola B seimbang tak stabil.
Setiap kali bola A digerakkan sedikit (perturbasi) ia akan kembali ke keadaan semula sedangkan bola B jika disentuh dengan tenaga yang amat kecil mungkin tidak akan bergeser tetapi sentuhan yang lebih keras sedikit (perturbasi) dapat menyebabkan bola B menggelinding jauh ke bawah dan tak akan kembali ke titik semula.

Gambar
2. Ilustrasi mengenai titik-titik keseimbangan stabil (A) dan tidak
stabil (B);
bola A dan bola B terletak di atas bidang bergelombang (lembah dan
puncak). A = titik
atraksi
(stabil), B = titik
repulsi (tak
stabil).
Keadaan
bola A menggambarkan status populasi yang seimbang stabil sedangkan
bola B
seimbang tak stabil. Gangguan yang sangat kecil yang merupakan batas
antara
dapat atau tidaknya bola B bergerak menjauh dari puncak bidang,
merupakan salah
satu perhatian dalam pembahasan mengenai keseimbangan. Hal ini analog
dengan
keadaan seimbang tidak stabil yang berlangsung dalam sistem populasi
yang
menjadi perhatian khusus para pakar ekologi, karena pada keadaan ini
gangguan
tertentu yang diberikan kepada populasi dapat mengakibatkan gejolak
yang
dampaknya dan waktunya sulit untuk diprediksi. Dalam keadaan demikian
perubahan
yang bersifat mendadak dan ekstrim dapat terjadi seperti ledakan atau
epidemi,
atau bahkan kemunduran luar biasa yang mengarah ke kepunahan sistem itu
(system
crash).
Dari
ilustrasi mengenai bola A dan B ini dapatlah dipahami bahwa yang
dimaksud
dengan keseimbangan dalam sistem hayati adalah tidak terjadinya gejolak
atau
perubahan yang berarti dalam sistem dengan berlangsungnya
waktu.
Dengan demikian maka jika pertumbuhan populasi yang berada dalam status
seimbang pada waktu tkemudian diamati pada waktu
t+1 maka
Nt = Nt+1 (1)
Dengan
tak adanya perubahan, maka tidak terdapat laju pertumbuhan, sehingga
dalam
keadaan seimbang,
dN/dt = 0 (2)
3.
ANALISIS KESEIMBANGAN PERSAMAAN DIFERENS LINIER
Perilaku
persamaan diferens linier perlu ditinjau karena kaitannya dengan
model-model
populasi diskrit yang dikaji per generasi. Demikian pula, model linier
berperan
penting dalam analisis keseimbangan karena model-model non-linier yang
diberi
perturbasi di dekat status keseimbangan memiliki perilaku linier.
Persamaan
diferens ordo n,
a0Nt
+ a1Nt-1 +...
+ anNt - n =
0,
atau
a0Nt-n +
a1Nt-n-1
+ ... + anNt
= 0
(3)
Misalkan
persamaan (3) memiliki koefisien-koefisien homogen, yaitu a0,
a1,
... an = konstan, maka pemecahan persamaan (3)
terdiri atas
kombinasi linier dari persamaan dalam
bentuk
Nt = C ƛt atau Nt = N0 ƛt (4)
(C =N0)
Nilai-nilai ƛ dapat
dapat diperoleh dengan mencari akar
ciri (eigen values) persamaan
a0 ƛn +
a1 ƛn-1 +
… + an = 0
(5)
Banyaknya
akar ciri adalah sebanyak ordo persamaan, yaitu n.
Untuk
memperoleh gambaran mengenai l
, akan ditinjau persamaan (4) dalam bentuk persamaan ordo
2 (persamaan
kuadrat),
a0 ƛ2 + a1 ƛ + a2 = 0 yang selanjutnya dapat dinyatakan dalam persamaan kuadrat:
ƛ2 + β ƛ + ᵧ = 0 (6)
( a1/a0 =
β
dan a2/a0 =
ᵧ)
Eigen values persamaan
kuadrat (6) ƛ1,2 = [
β ±
( β2 -
4 ᵧ)1/2 ] / 2
Untuk
nilai ƛ riel
(diskriminan 0),
penyelesaian dasar
perilaku kualitatif persamaan (6) ditentukan oleh kisaran nilai ƛ berikut:
1. ƛ >
1 ,
N2
meningkat (sesuai
peningkatan t);
2.
0 < ƛ <
1 ,
N2
menurun (dengan menurunnya t);
3. - 1 < ƛ < 0 ,
Nt berosilasi
di antara nilai-nilai positif dan negatif dengan amplitudo yang
lambat-laun
semakin menurun ke 0 (osilasi konvergen, keseimbangan stabil);
4. ƛ > -1 ,
Nt
juga berosilasi tetapi semakin besar amplitudonya (osilasi
divergen,
keseimbangan tak stabil).
Situasi
2 dan 3 di mana: 0
< ƛ
< 1
dan -
1 < ƛ < 0
atau
nilai absolut ƛ --> l ƛ
l < 1
(7)
menunjukkan
sebuah keseimbangan yang bersifat stabil, berarti perturbasi
(gangguan kecil)
pada keadaan seimbang ini dapat diserap oleh sistem. Jika
ƛ = a
, maka persamaan (4) menjadi:
Nt
= at N0
atau
Nt+1 =
a Nt
,
dan
sesuai persamaan (7) bersifat seimbang stabil jika memenuhi persyaratan
| a| < 1
(8)
4.
METODE GRAFIK DENGAN ITERASI REKURSIF
Analisis
model persamaan logistik di muka merupakan salah satu metode analisis
keseimbangan bagi populasi model diferens nonlinier melalui metode
linier. Di
samping analisis dengan kalkulus keseimbangan dalam dinamika populasi
dapat
pula dianalisis dengan metode grafik.
Metode
grafik juga merupakan salah satu cara untuk memperoleh gambaran visual
bagaimana proses dinamika populasi mengikuti suatu persamaan atau model
tertentu, dan untuk melakukannya parameter-parameter model perlu diberi
nilai.
Analisis yang mirip dengan analisis sensitivitas ini dilakukan dengan
memplotkan nilai populasi pada saat tertentu (Nt+1)
terhadap
kerapatan populasi saat satu selang sebelumnya (Nt).
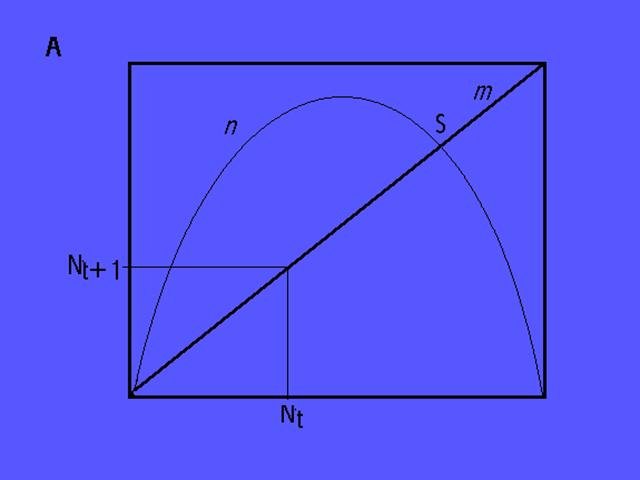
Gambar
3.
A. Kurva n =
f
(Nt), garis
diagonal Nt+1
= Nt
B.
Contoh analisis grafik dengan iterasi.
Dalam
keadaan seimbang maka kerapatan populasi pada waktu t+1 adalah sama
dengan pada
waktu t, sehingga Nt+1 = Nt. Selanjutnya,
jika Nt+1 digrafikkan terhadap Nt
yaitu
y =
N t+1 dan x =
Nt
sebagai dua vektor yang sama besar maka akan terlihat (Gambar 3 A) bahwa garis diagonal m (45o) merupakan garis keseimbangan.
Kurva n = f
(Nt)
adalah garis kisaran Nt+1 terhadap Nt
dengan berjalannya waktu. Dalam keadaan seimbang populasi pada
waktu t+1 sama dengan populasi waktu t
atau = Nt
:
Nt+1 = Nt
sehingga
titik potong proyeksi Nt
dan N t+1 terdapat ada diagonal m tersebut,
bukan di n. Jika
populasi menyimpang dari keseimbangan maka Nt+1 akan
berada di kurva
n. Perpotongan antara kurva n
dengan diagonal (garis
keseimbangan) m adalah titik S yang
merupakan titik keseimbangan.
Cara
menyusun grafik dengan iterasi adalah pertama-tama dibuat garis-garis Nt+1
dan Nt, tarik diagonal m
kemudian dibuat kurva n.
Dengan memilih nilai awal N0
dapat ditentukan N1
(N1
= f (N0)
pada kurva.
Selanjutnya
pada bagian 5 berikut, dengan
persamaan
diskrit:
Nt+1 = r Nt
(1 - Nt),
dilakukan
simulasi iteratif untuk memperoleh grafik-grafik perkembangan populasi
pada
berbagai langkah waktu (t), dan untuk beberapa nilai N dan r, yaitu:
0 > N > 1
dan
1.8 > r > 4.
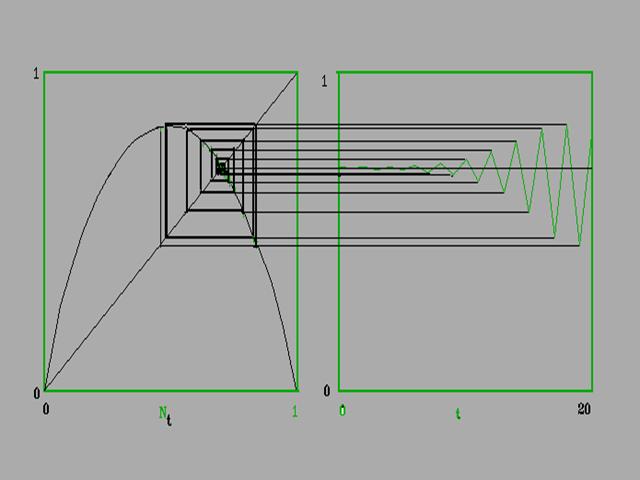
5.
SIMULASI ITERASI GRAFIK
Contoh
simulasi iterasi grafik diberikan pada Gambar-gambar berikut, dengan
berbagai
nilai-nilai bagi laju pertumbuhan (r), keadaan populasi awal (N0
)
dan lamanya waktu perkembangan (t).
Gambar 4.1.
Simulasi dengan laju (r) = 3.35,
status awal populasi (N0 ) =
0.703, dan lamanya waktu (t) = 20, atau
t = 0 … 20, menghasilkan pertumbuhan siatem populasi divergen, dari titik
keseimbangan menuju ke
luar (tak stabil).
Ga
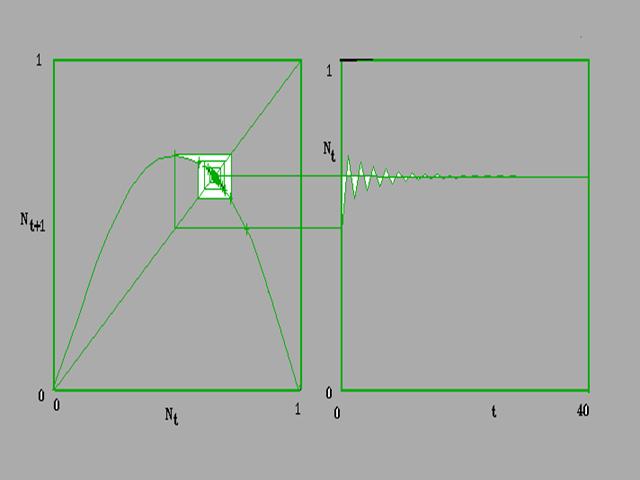
Gambar 4.2.
r = 2.85, N0 = 0.78, t = 0 … 40
menghasilkan kurva pertumbuhan dengan osilasi konvergen, kemudian
osilasi berhenti, menuju titik keseimbangan
(seimbang stabil).

Gambar 4.3.
r = 3.3, N0 = 0.1,
t = 0 … 40 ,
menunjukkan perkembangan dengan kurva divergen kemudian berosilasi
kekal,
siklus dua titik.

Gambar 4.4.
r = 1.8, N0 = 0.01,
t = 0 … 10.
Kurva menunjukkan perkembangan populasi yang seimbang
stabil-menanjak,
kemudian mencapai asimptot (daya dukung), tanpa osilasi. Kurva seperti
ini adalah
khas kurva logistik, dengan dua titik seimbang yaitu 0 dan K (stabil).
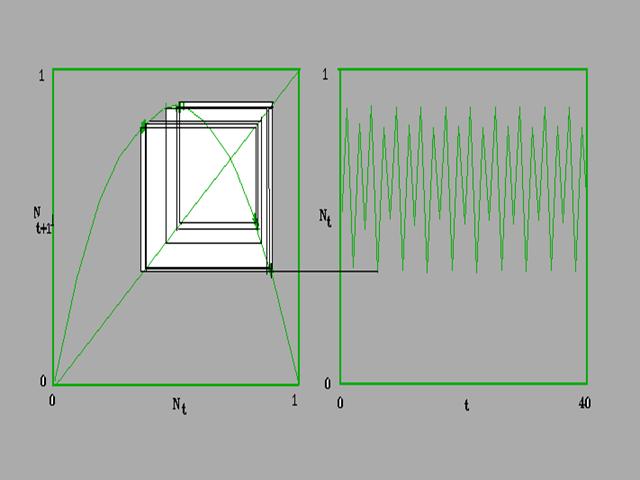
Gambar 4.5.
r = 3.5.
Kurva menunjukkan, setelah t = 10 osilasi permanen dengan siklus dua titik.
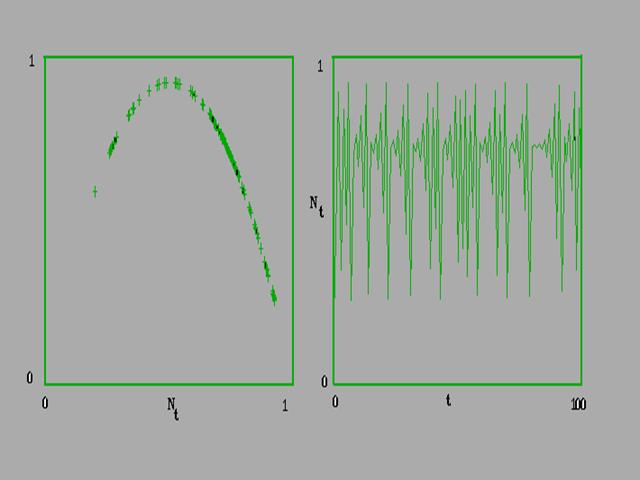
Gambar 4.6.
r = 3.7 , N0 = 0.2,
t = 0 … 100. Kurva
menunjukkan divergensi dan konvergensi yang berlangsung
berulang-ulang dengan pola tidak teratur yang dikenal sebagai fenomena
galau (chaotic).
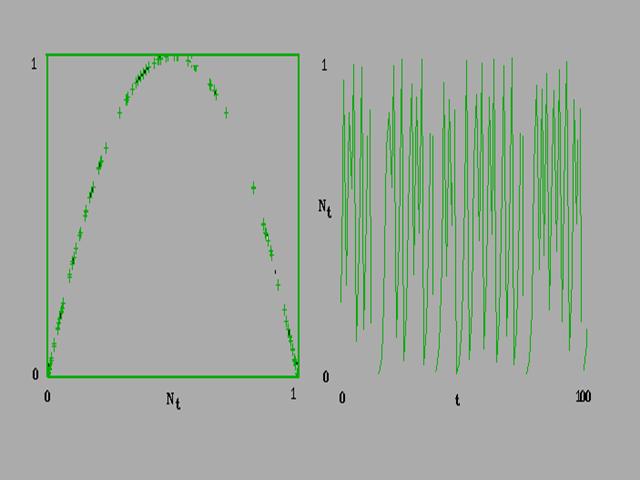
Gambar 4.7.
r =
4, N0
= t = 0 …
100 , kurva
menunjukkan pertumbuhan yang tidak stabil dengan osilasi
yang tak teratur (galau, chaos) dan tak dapat
diramalkan. Keadaan
chaos seperti ini dapat menimbulkan epidemi atau
kepunahan populasi (population
crash).
Literatur:
Edelstein-Keshet, L.
Mathematical Models in Biology. New York:
Random House.
1988.
586 p.
Tarumingkeng, Rudy C . Dinamika
Populasi. Kajian Ekologi Kuantitatif. Jakarta:
Pustaka
Sinar Harapan dan UKRIDA. 1994. 284 p.
ã 2001 Rudy C Tarumingkeng PhD